| Version 22 (modified by , 18 years ago) (diff) |
|---|
Mutekp
Bienvenue sur le site du projet.
MUTEKP est un noyau de système d’exploitation pour des architectures multiprocesseur intégrées sur puce de type MPSoCs.
Muni d'un code claire et facile à lire, MUTEKP a été crée dans le but de disposer d’un noyau embarqué à vocation pédagogique
implémentant l’API des threads POSIX sur des architectures MPSoCs et mettant en avant les concepts système utilisés.
Il servira comme un support pédagogique dans différents modules du MASTER ACSI.
Manuel d'utilisation
I. Organisation des bibliothèques système
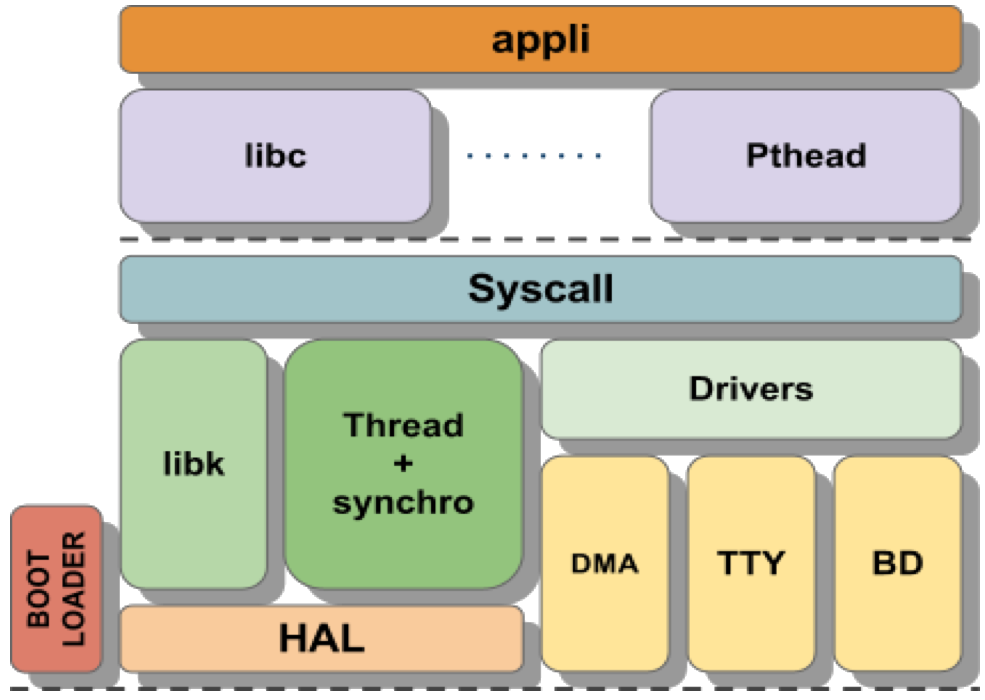
La figure suivante illustre la modalisation du système :

Les bibliothèques constituant le système sont :
- pthread : contient l’implémentation d’un sous-ensemble des thread POSIX.
- libc : contient l’implémentation des services système tel que malloc, printf, pipe, memcpy …etc.
- mwmr : contient l’implémentation du protocole MWMR.
- cpu : contient le code système en assembleur qui dépend de type des processeurs de la plate-forme.
- arch : contient le code C qui dépend de la plate-forme tel que des configurations système vis-à-vis des composants de la plate-forme, les ISR d’interruption des différant types de cibles …etc.
Les bibliothèques pthread, libc et mwmr sont indépendantes de la spécification de la plate-forme.
En cas de modification au niveau de la configuration matériel, il suffit d’adapter le code système des deux bibliothèques cpu et arch pour pouvoir déployer MUTEKP sur la nouvelle plate-forme.
II. API système
MUTEKP fourni trois bibliothèques pour les threads de l’application :
- Un sous-ensemble de l'API des threads POSIX :
- pthread_attr_init : initier la structure d’un attribut.
- pthread_create : créer une tâche
- pthread_exit : mettre fin à une tâche avec une valeur de retour
- pthread_self : Donner l’indenté du thread appelant.
- pthread_equal : tester l’égalité entre deux identificateur.
- pthread_yield : céder le processeur pour un autre thread.
- pthread_join : attendre la fin d’un thread.
- pthread_spin_init : initialiser un verrou à une attente active.
- pthread_spin_destroy: détruire un verrou.
- pthread_spin_lock : verrouiller le verrou à une attente active.
- pthread_spin_trylock : version non bloquante de pthread_spin_lock.
- pthread_spin_unlock : déverrouiller le verrou à une attente active.
- Les fonctions implémentant le protocole MWMR :
- mwmr_read : lecture d’un FIFO MWMR.
- mwmr_write : écriture dans un FIFO MWMR.
- mwmr_init : création et initialisation d’un FIFO MWMR.
- Quelques fonctions de la bibliothèque libC :
- printf : afficher une chaîne de caractère formatée.
- malloc : allocation de mémoire dynamique.
- pipe : créer un tube de communication (par flux d’octets) enter deux threads.
- read : pour lire d’un buffer ou un tube.
- write : pour écrire dans un buffer ou un tube.
- memset : remplir une zone mémoire par une valeur donnée.
- memcpy : copie une zone moire source vers une autre zone mémoire distination.
La norme POSIX ne propose pas dans son API pthread aucun appel permettant d’affecter ou de spécifier un thread à un processeur donné.
MUTEKP propose l’appel pthread_attr_setprocid_np qui permet d’affecter un numéro de processeur à un attribue. Cela permettra de passer cette attribue au moment de la création d’un nouveau thread, ainsi de préciser sur quel processeur ce dernier va-t-il s’exécuter.
III. L’Organisation des fichiers systèmes
IV. La génération d’une application
V. Description de la plateforme
Manuel de développement
I. La plate-forme matérielle
II. Architecture du MUTEKP
III. Introduction au noyau MUTEKP
III.1 Le concept d’un thread dans le système
III.2 États d’un thread
III.3 Les transitions d’états
III.4 Ordonnancement des threads
III.5 Organisation et gestion de la mémoire
III.5.1 L’organisation mémoire
III.5.2 La gestion mémoire
III.6 Le buffer système
IV. Détaille du noyau et les structures de données système
IV.1 Gestion des threads
IV.1.1 La structure de donnée du thread
IV.1.2 La structure de donnée Ordonnanceur et la table d’ordonnancement
IV.2 Gestion de la mémoire
IV.2.1 La structure gestionnaire mémoire
IV.3 Gestion des périphériques
IV.3.1 La structure gestionnaire des verrous
IV.3.2 Représentation des cibles (TTY, Timer et ICU)
Attachments (2)
-
plateforme.png (98.6 KB) - added by 16 years ago.
Architecture de la plateforme matérielle
- 2011_MI074_2_Hello.pdf (333.3 KB) - added by 15 years ago.
{kind=link}
{kind=link}
Download all attachments as: .zip